
Why Do We Regret ?
Abstract
The human experience is often perceived through a deterministic lens, where outcomes are viewed as direct consequences of agency. This paper argues that a human life is more accurately modeled as a single realization of a continuous-time stochastic process. By applying Monte Carlo methods and Control Theory, we derive a mathematical definition of "Regret" as the divergence between an optimal trajectory and a realized path. We conclude that "Fate" is simply the collapse of a probability density function (PDF) into a Dirac delta function over time.
1. The State Space Formulation (H)
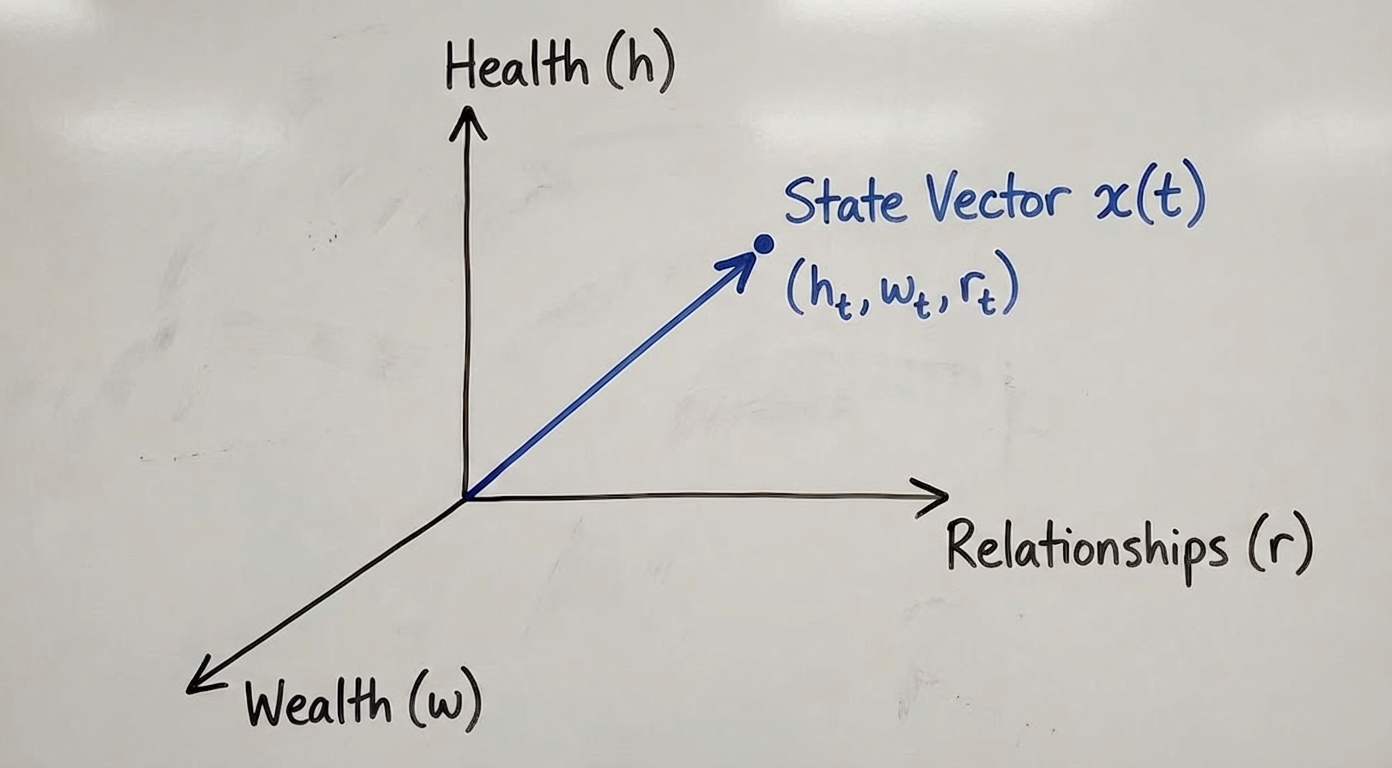
We begin by defining the "Life State" not as a scalar value of happiness, but as a vector within a high-dimensional Hilbert Space H. At any instant t, the state of an individual is given by the vector x(t):
Where components represent orthogonal basis vectors of existence, such as Economic Utility, Biological Entropy, and Synaptic Complexity. The magnitude of this vector, , represents the total "Capacity" of the individual at time t.
The whiteboard drawing below illustrates this concept, showing a state vector in a 3D space defined by Health, Wealth, and Relationships.
2. The Governing Stochastic Differential Equation (SDE)
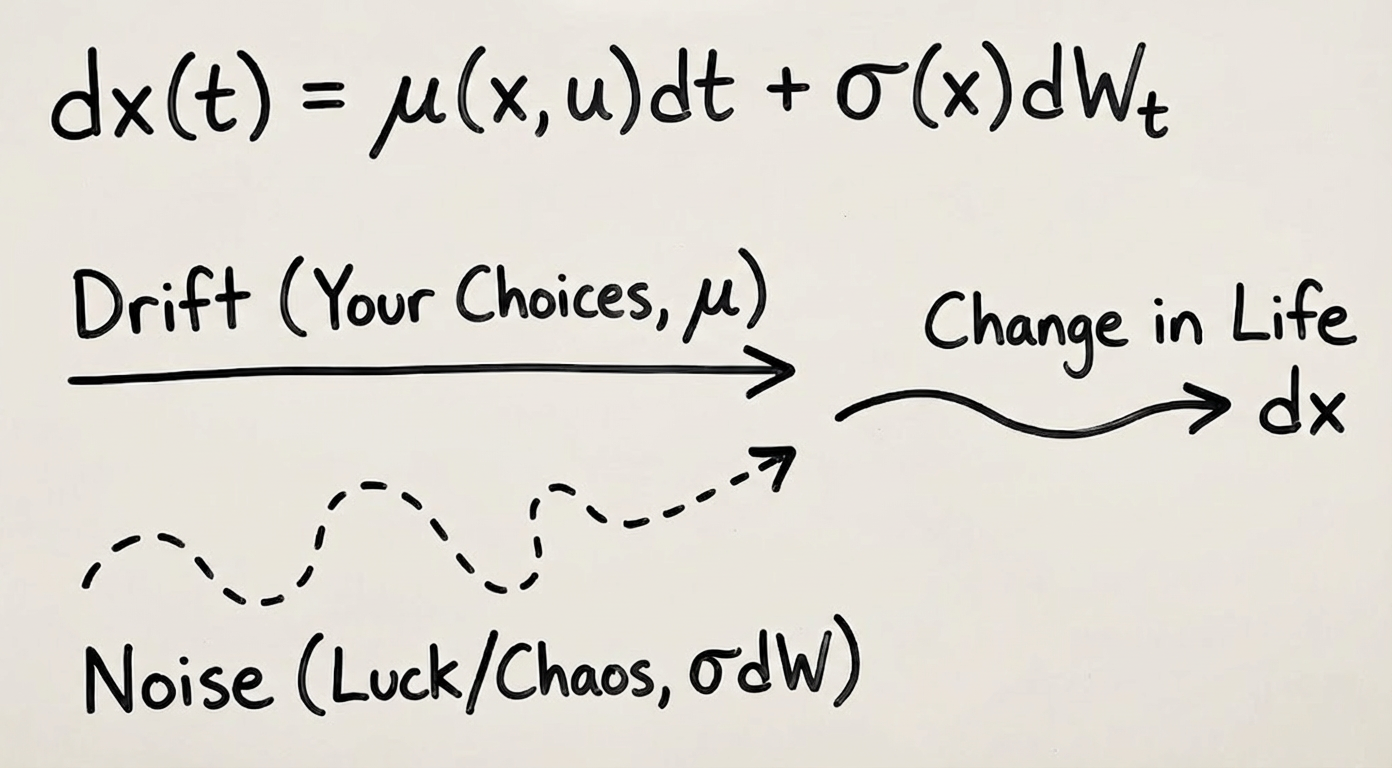
The evolution of x(t) is not a simple linear transformation. It is governed by a Stochastic Differential Equation that accounts for both your decisions and unavoidable noise:
This equation highlights the two primary forces at play: the deterministic Drift Term (), which represents the impact of your deliberate choices (), and the stochastic Noise Term (), which represents pure luck or "chaos".
The whiteboard diagram below breaks down this equation, showing how your choices and random noise combine to create the change in your life's trajectory.
3. Monte Carlo Integration: The Manifold of Possibilities
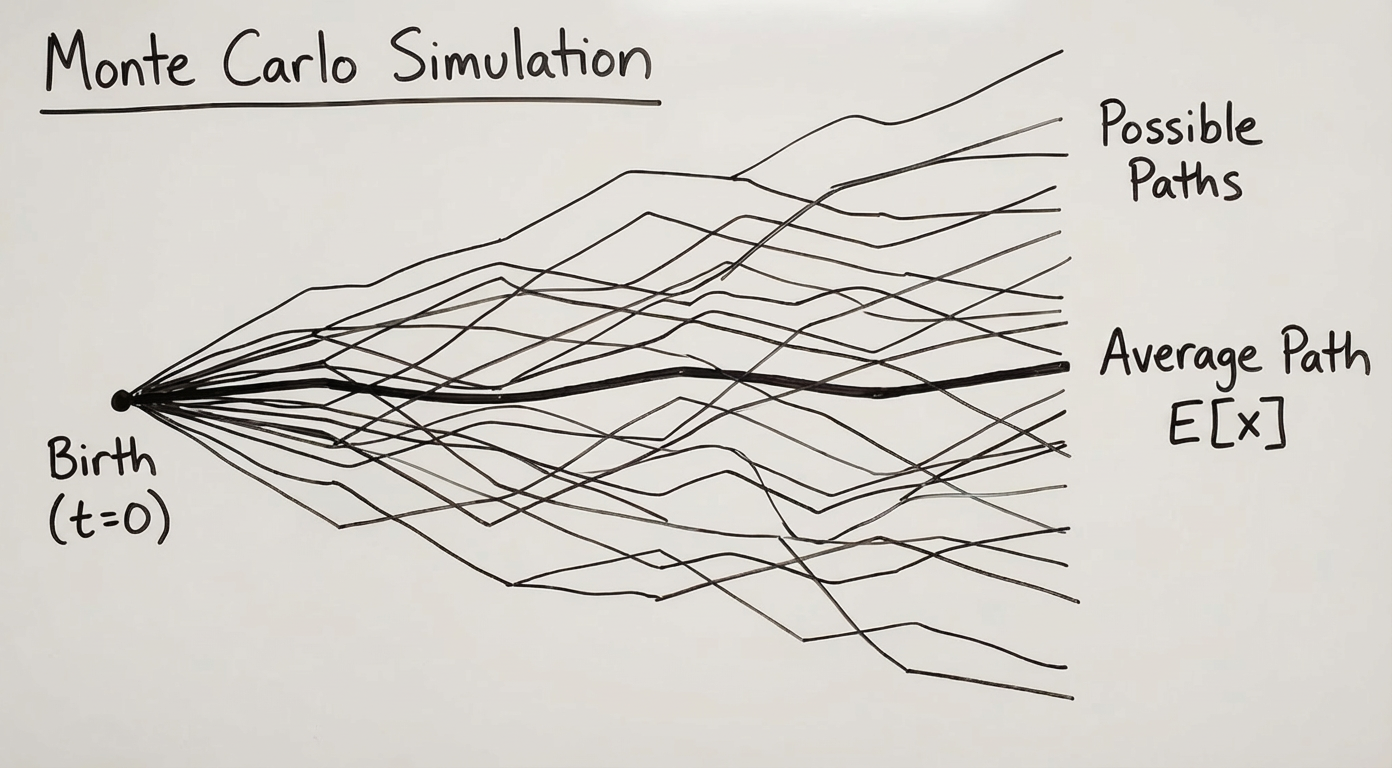
Since we cannot solve the SDE analytically for complex life systems, we must estimate the "Potential of a Life" using Monte Carlo Integration. We simulate parallel universes, each with a different noise path . The Expected Trajectory () represents the "Average Life"—the path where good and bad luck cancel out.
The whiteboard drawing below visualizes this concept as a branching tree of possibilities, starting from birth and diverging into many potential life paths, with the average path highlighted in the center.
4. Quantifying Regret: The Kullback-Leibler Divergence
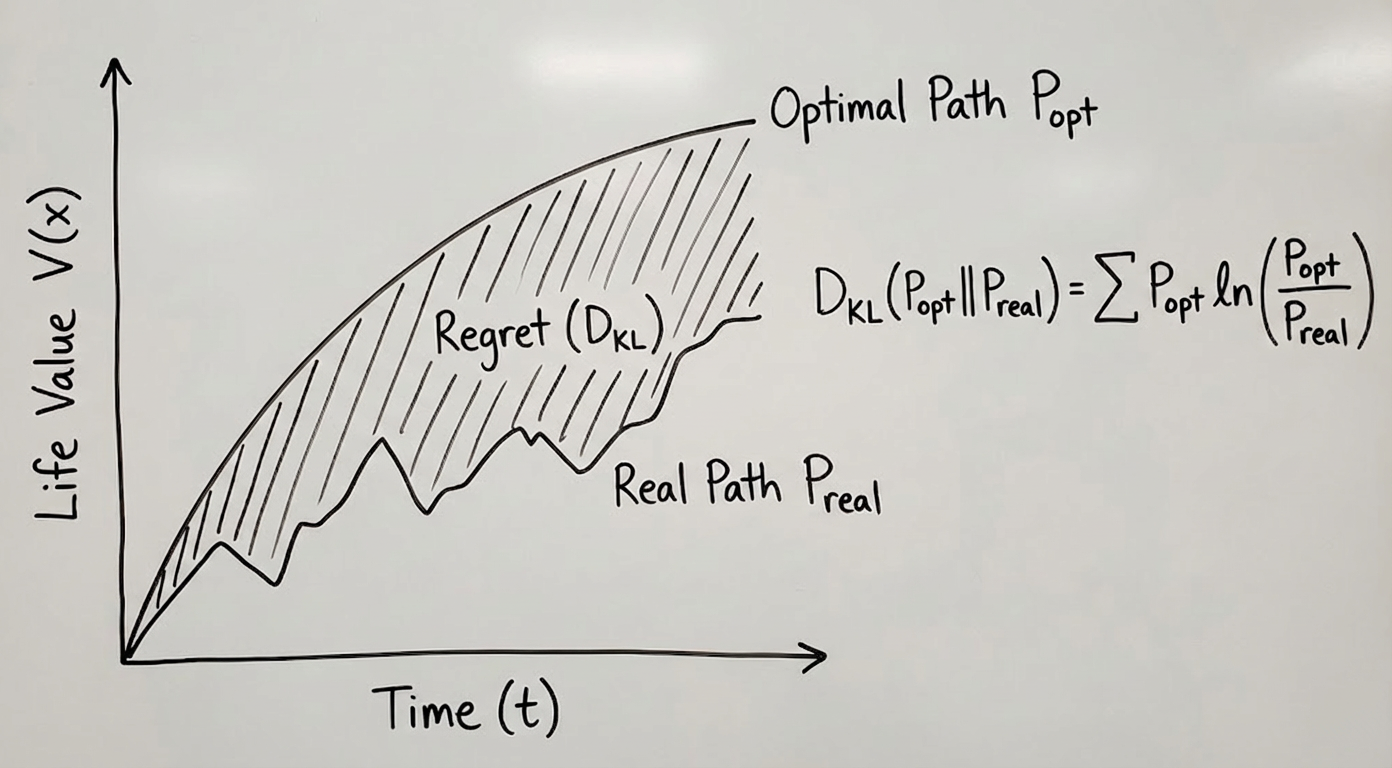
Regret is not merely sadness; it is an information-theoretic quantity. It is the measure of information lost when we are forced to inhabit our actual reality instead of the optimal one. We can define Cumulative Regret using the Kullback-Leibler (KL) Divergence between the optimal probability distribution () and the realized distribution ().
The whiteboard graph below illustrates this concept. Regret is represented by the shaded area between the ideal, smooth "Optimal Path" and the jagged, noisy "Real Path" that you actually experience.
5. The Single-Sample Fallacy (The Tragedy of N=1)
The fundamental error in human reasoning is assuming that the Law of Large Numbers applies to the individual. This law guarantees that on average, fairness exists. But you are not the average. You are a sample size of N=1. There is no convergence. You are fully exposed to the raw variance of the universe. To judge yourself based on the "Expected Value" is a mathematical fallacy, because you never had the opportunity to run the simulation enough times to converge to that mean.
Conclusion: Embracing the Stochastic
We can rewrite the popular concept of "Fate" using the Dirac Delta Function. Before time t, your future is a probability density function (PDF), a cloud of potential. At the moment t passes, the function collapses:
Regret is the refusal to accept this collapse. It is the irrational desire to keep the PDF open after the observation has been made. The mathematically sound approach to life is not to minimize Regret (which is retrospective and unchangeable), but to maximize the Signal-to-Noise Ratio (SNR) of the present moment.
Stop trying to optimize a simulation you only get to run once.